 返回首页
返回首页 在线订单
在线订单 联系我们
联系我们

多用途机械系统传动实验台的设计分析
发布时间:2017-09-15 点击次数:次
随着经济的发展和生产水平的不断提高,机械行业对机械专业人才的要求也越来越高,不仅要求应具有扎实的理论功底,而且还需具备熟练的技术运用能力和较强的创新能力,因此创新实践教学是人才培养过程中的关键环节,是理论联系实际、培养学生创新意识和实践能力的重要平台。机械设计、机械原理、机械设计基础等课程是机械类专业的专业基础课和专业课,有其本身的重要性。目前,全国大多数理工类大专院校机电专业都开设了与之相关的教学认知实践课,但是大多数学校都是给学生观看陈列柜中摆放的常见机构,由于机构是静止不动的,学生只能认识其基本结构,无法了解机构的运动过程及其实现的功能。
针对上述情况,本文设计一种使学生既能够认识机构的基本结构,又能知道机构运动传递过程及其要实现的功能的机械系统传动实验台,该实验台主要包括学生运动机械传动机构、教师运动机械传动机构、时钟运动机械传动机构、教室门运动机械传动机构以及投影幕布运动机械传动机构五个部分。
1、机械结构设计
1.1 学生运动机械传动机构
(1)基本结构原理
动力源:电机:型号:60KTYZ,220V,10r/min,20W 单向可逆同步电机。
EF-小腿,ED-大腿,CD-身躯,CB-大手臂,AB-小手臂学生在坐着与站立时的状态如图所示,小腿在F 处固定在机架上,小手臂与机架在A 处形成固定铰链,小手臂、大手臂、身躯、大腿、小腿之间通过活动铰链链接。
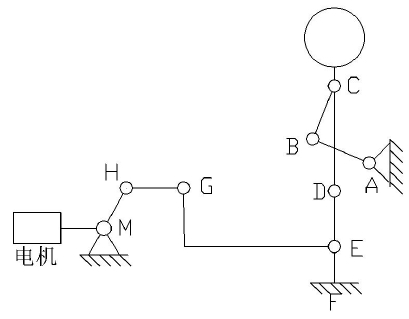
图1 学生机构运动示意图
(2)机构传动过程
① 学生坐下时,大腿与小腿之间的角度为-90°,身躯与大腿之间的角度为90°,大手臂与身躯之间的角度为60°。
② 学生起立时,大腿与小腿之间的角度为-180°,身躯与大腿之间的角度为180°,大手臂与身躯之间的角度为-15°。
学生在坐着与站立时的状态如图所示,小腿在F 处固定在机架上,小手臂与机架在A 处形成固定铰链,小手臂、大手臂、身躯、大腿、小腿之间通过活动铰链链接。
在设计学生连杆机构ABCDEF 运动时自由度计算可逆同步电机。
链传动机构:大链轮:齿数16,小链轮,齿数8。
齿轮齿条传动机构:齿轮:齿数28,模数1.5.
丝杆螺母传动机构:丝杆外径17mm,单头,螺距6mm.
限位开关:SY-TX-SN5C
限位板,2mm 厚冷轧板
通过螺钉把教师木偶人同齿轮齿条传动机构中的齿轮固定在一起,齿轮套在螺母上面的销轴上,齿轮与销轴之间可以相对转动。小链轮太小,并且传力不大,因此在设计时采用M3 的小螺钉,直接把小链轮固定在丝杆上,不采用键连接。

说明在驱动学生连杆机构运动时需要2 个运动件,学生机构运动位置才具有确定性,但是本设计中只采用了一个电机,如何解决此问题?我们设计小组在设计时,考虑了两个两个方案,其一,采用角度限位的方法对其进行角度约束。其二改变结构,减少一个连杆。如图2 所示。
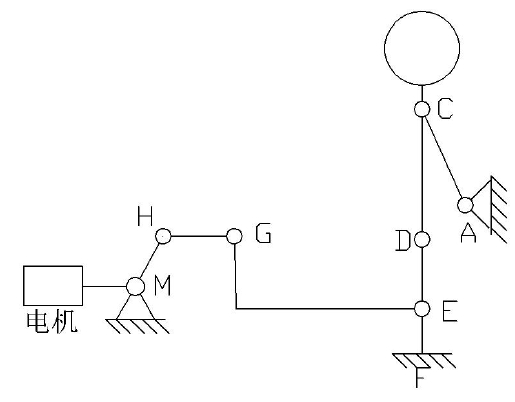
图2 学生机构运动示意图(减少一个连杆)
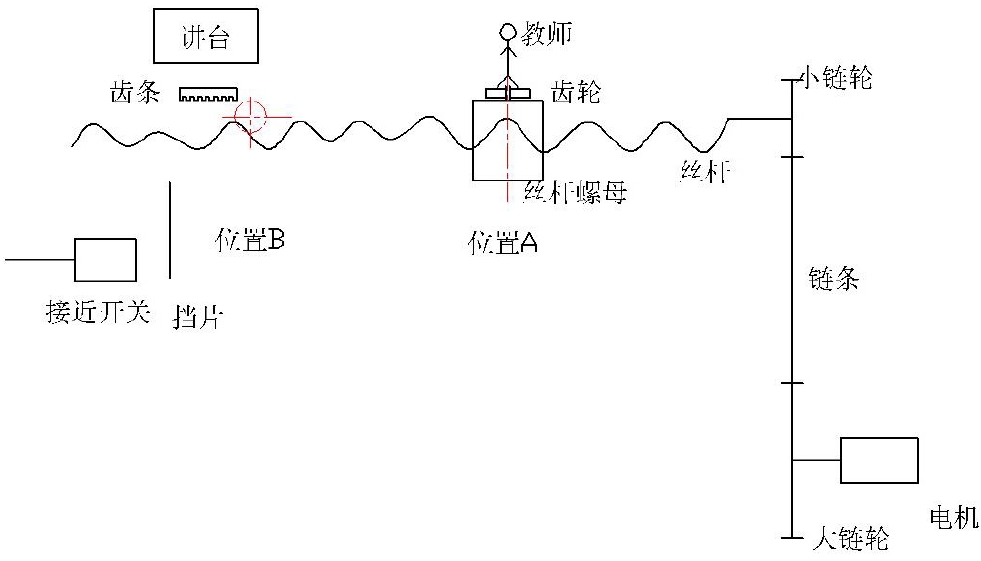
图3 教师机构运动示意图
1.2 教师运动机械传动机构
(1)基本结构原理
动力源:电机:型号:60KTYZ,220V,10r/min,20W 单向教师木偶人移动速度:

(2)机构传动过程
如图3 所示的教师运动机构,电机启动,通过链传动传递给丝杆,电机转速较慢,因此可以采用链传动,丝杆的螺距比较小,为了提高教师木偶人运动速度,链传动采用实行增速,传动比为2:1。丝杆的旋转运动转变成螺母的直线运动,通过螺母上的销轴带动放置在螺母上的尺寸做直线移动,因此实现了教师木偶人的移动。当螺母带动教师木偶人走到讲台时,齿轮与齿条开始啮合传动,带动教师木偶人开始旋转,由于齿轮是28 个齿,因此只需要齿轮与齿条啮合传动7 个齿数时,安装在螺母上限位板,与安装在机架上的限位开关接触,电机停止转动,实现教师转动90°面向学生。
1.3 时钟运动机械传动机构
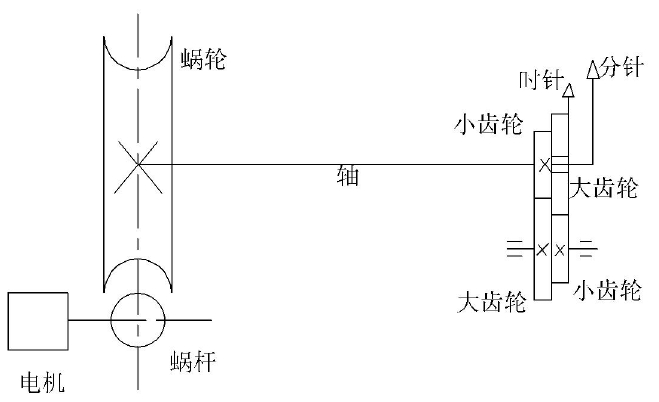
图4 时钟机构运动示意图
(1)基本结构原理
动力:电机:型号:60KTYZ,220V,10r/min,20W 单向可逆同步电机。
蜗轮:齿数35,螺杆:单头;二级圆柱齿轮传动机构:
每级大齿轮齿数45,小齿轮齿数13,模数1.5,红外位置探测开关
(2)机构传动过程
如图4 所示的时钟运动机构,电机启动,通过蜗轮蜗杆把运动传递给二级直齿圆柱齿轮,蜗轮蜗杆的减速比为1:35。与蜗轮连接的第一级圆柱齿轮的小齿轮带动分针转动,第二级圆柱齿轮齿轮的大齿轮带动时针转动。为了实现时针与分针走动速度为1:12 的关系,二级圆柱齿轮的减速比为1:12.每一级的减速比为1: 2 3 。
为了实现当时钟在7:50 时开始走动,8 点停止走动的动作。时钟初始位置在7 点50,按下时钟工作,按钮在蜗轮的后面配置了两个红外位置探测器,蜗轮上设置有孔,红外位置探测器,自己发出红外信号,当有物体挡住时就返回自己接受自己接收。7 点50 时候一个红外位置探测器,对准蜗轮上一个孔,启动时钟工作按钮,时钟开始旋转,当走到8 点整时,红外位置探测器对准另外一个孔,就没有反馈信号(0 信号),这时控制继电器工作(状态发生改变),时钟停止始走。当发出的红外信号挡住返回时,就有反馈信号(1 信号),这时继电器不工作(保持原态)。即有反馈信号,继电器不工作,没有反馈信号时,继电器动作。即属于负逻辑控制。
1.4 教室门运动机械传动机构
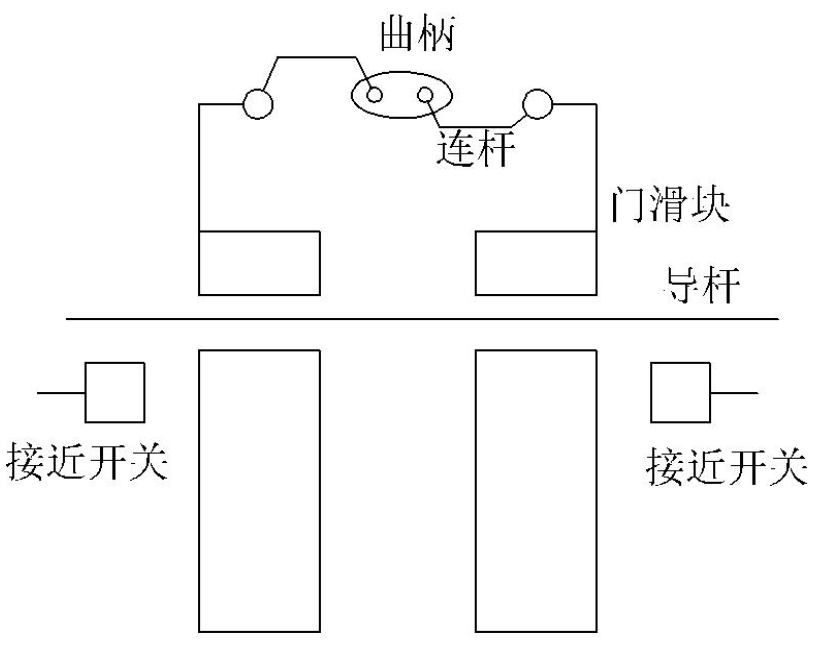
图5 教室门机构运动示意图
(1)基本结构原理
动力:电机:型号:60KTYZ,220V,10r/min,20W 单向可逆同步电机。
双曲柄、连杆、滑块(教室门)、限位开关:SY-TX-SN5C
(2)机构传动过程
如图5 所示教室门运动机构,电机启动,带动双曲柄滑块机构中双曲柄转动,曲柄通过连杆,带动教室门在导轨上进行来回往复运动,实现教室门的开关。开关门的位置,通过在开关门的极限位置设置限位开关,控制电机的正转和反转,实现换向。电机顺时针转动180°时,关门。电机逆时针转动时180°开门。当门关好后,通过限位开关一直发出信号,电机停止转动,但继电器保存信号,使下一次通电时,电机必须反转,因此采用互锁电路。
1.5 投影幕布运动机械传动机构
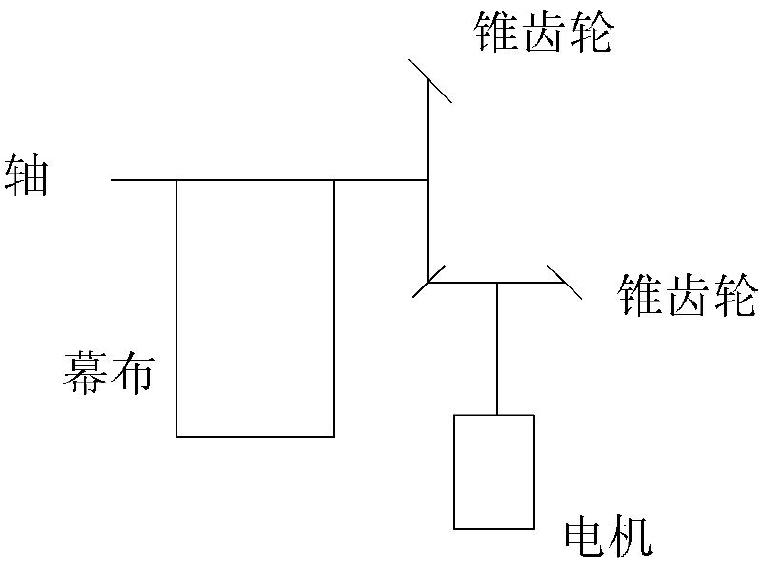
图6 投影幕布机构运动示意图
(1)基本结构原理
动力:电机:型号:60KTYZ,220V,10r/min,20W 单向可逆同步电机。
大圆锥齿轮,小圆锥齿轮,实现90°换向增速
(2)机构传动过程
如图6 所示投影幕布运动机构,电机启动,带动大圆锥齿轮转动,通过小圆锥齿轮带动幕布上下运动。幕布最上最下的位置,通过在幕布的极限位置设置限位开关,控制电机的正转和反转,实现换向。电机顺时针转动时,幕布下。电机逆时针转动时幕布上。当幕布下到最下位置时,通过限位开关一直发出信号,电机停止转动,但继电器保存信号,使下一次通电时,电机必须反转,因此采用互锁电路。
本实验台机电相结合,集科学性与趣味性于一体,寓教于乐,以学生熟悉的教学环境设计机械系统传动系统,情景式教学演示台,可以极大地提高学生的学习机械原理课程的兴趣,有利于进行课堂教学。
针对上述情况,本文设计一种使学生既能够认识机构的基本结构,又能知道机构运动传递过程及其要实现的功能的机械系统传动实验台,该实验台主要包括学生运动机械传动机构、教师运动机械传动机构、时钟运动机械传动机构、教室门运动机械传动机构以及投影幕布运动机械传动机构五个部分。
1、机械结构设计
1.1 学生运动机械传动机构
(1)基本结构原理
动力源:电机:型号:60KTYZ,220V,10r/min,20W 单向可逆同步电机。
EF-小腿,ED-大腿,CD-身躯,CB-大手臂,AB-小手臂学生在坐着与站立时的状态如图所示,小腿在F 处固定在机架上,小手臂与机架在A 处形成固定铰链,小手臂、大手臂、身躯、大腿、小腿之间通过活动铰链链接。
图1 学生机构运动示意图
(2)机构传动过程
① 学生坐下时,大腿与小腿之间的角度为-90°,身躯与大腿之间的角度为90°,大手臂与身躯之间的角度为60°。
② 学生起立时,大腿与小腿之间的角度为-180°,身躯与大腿之间的角度为180°,大手臂与身躯之间的角度为-15°。
学生在坐着与站立时的状态如图所示,小腿在F 处固定在机架上,小手臂与机架在A 处形成固定铰链,小手臂、大手臂、身躯、大腿、小腿之间通过活动铰链链接。
在设计学生连杆机构ABCDEF 运动时自由度计算可逆同步电机。
链传动机构:大链轮:齿数16,小链轮,齿数8。
齿轮齿条传动机构:齿轮:齿数28,模数1.5.
丝杆螺母传动机构:丝杆外径17mm,单头,螺距6mm.
限位开关:SY-TX-SN5C
限位板,2mm 厚冷轧板
通过螺钉把教师木偶人同齿轮齿条传动机构中的齿轮固定在一起,齿轮套在螺母上面的销轴上,齿轮与销轴之间可以相对转动。小链轮太小,并且传力不大,因此在设计时采用M3 的小螺钉,直接把小链轮固定在丝杆上,不采用键连接。
说明在驱动学生连杆机构运动时需要2 个运动件,学生机构运动位置才具有确定性,但是本设计中只采用了一个电机,如何解决此问题?我们设计小组在设计时,考虑了两个两个方案,其一,采用角度限位的方法对其进行角度约束。其二改变结构,减少一个连杆。如图2 所示。
图2 学生机构运动示意图(减少一个连杆)
图3 教师机构运动示意图
1.2 教师运动机械传动机构
(1)基本结构原理
动力源:电机:型号:60KTYZ,220V,10r/min,20W 单向教师木偶人移动速度:
(2)机构传动过程
如图3 所示的教师运动机构,电机启动,通过链传动传递给丝杆,电机转速较慢,因此可以采用链传动,丝杆的螺距比较小,为了提高教师木偶人运动速度,链传动采用实行增速,传动比为2:1。丝杆的旋转运动转变成螺母的直线运动,通过螺母上的销轴带动放置在螺母上的尺寸做直线移动,因此实现了教师木偶人的移动。当螺母带动教师木偶人走到讲台时,齿轮与齿条开始啮合传动,带动教师木偶人开始旋转,由于齿轮是28 个齿,因此只需要齿轮与齿条啮合传动7 个齿数时,安装在螺母上限位板,与安装在机架上的限位开关接触,电机停止转动,实现教师转动90°面向学生。
1.3 时钟运动机械传动机构
图4 时钟机构运动示意图
(1)基本结构原理
动力:电机:型号:60KTYZ,220V,10r/min,20W 单向可逆同步电机。
蜗轮:齿数35,螺杆:单头;二级圆柱齿轮传动机构:
每级大齿轮齿数45,小齿轮齿数13,模数1.5,红外位置探测开关
(2)机构传动过程
如图4 所示的时钟运动机构,电机启动,通过蜗轮蜗杆把运动传递给二级直齿圆柱齿轮,蜗轮蜗杆的减速比为1:35。与蜗轮连接的第一级圆柱齿轮的小齿轮带动分针转动,第二级圆柱齿轮齿轮的大齿轮带动时针转动。为了实现时针与分针走动速度为1:12 的关系,二级圆柱齿轮的减速比为1:12.每一级的减速比为1: 2 3 。
为了实现当时钟在7:50 时开始走动,8 点停止走动的动作。时钟初始位置在7 点50,按下时钟工作,按钮在蜗轮的后面配置了两个红外位置探测器,蜗轮上设置有孔,红外位置探测器,自己发出红外信号,当有物体挡住时就返回自己接受自己接收。7 点50 时候一个红外位置探测器,对准蜗轮上一个孔,启动时钟工作按钮,时钟开始旋转,当走到8 点整时,红外位置探测器对准另外一个孔,就没有反馈信号(0 信号),这时控制继电器工作(状态发生改变),时钟停止始走。当发出的红外信号挡住返回时,就有反馈信号(1 信号),这时继电器不工作(保持原态)。即有反馈信号,继电器不工作,没有反馈信号时,继电器动作。即属于负逻辑控制。
1.4 教室门运动机械传动机构
图5 教室门机构运动示意图
(1)基本结构原理
动力:电机:型号:60KTYZ,220V,10r/min,20W 单向可逆同步电机。
双曲柄、连杆、滑块(教室门)、限位开关:SY-TX-SN5C
(2)机构传动过程
如图5 所示教室门运动机构,电机启动,带动双曲柄滑块机构中双曲柄转动,曲柄通过连杆,带动教室门在导轨上进行来回往复运动,实现教室门的开关。开关门的位置,通过在开关门的极限位置设置限位开关,控制电机的正转和反转,实现换向。电机顺时针转动180°时,关门。电机逆时针转动时180°开门。当门关好后,通过限位开关一直发出信号,电机停止转动,但继电器保存信号,使下一次通电时,电机必须反转,因此采用互锁电路。
1.5 投影幕布运动机械传动机构
图6 投影幕布机构运动示意图
(1)基本结构原理
动力:电机:型号:60KTYZ,220V,10r/min,20W 单向可逆同步电机。
大圆锥齿轮,小圆锥齿轮,实现90°换向增速
(2)机构传动过程
如图6 所示投影幕布运动机构,电机启动,带动大圆锥齿轮转动,通过小圆锥齿轮带动幕布上下运动。幕布最上最下的位置,通过在幕布的极限位置设置限位开关,控制电机的正转和反转,实现换向。电机顺时针转动时,幕布下。电机逆时针转动时幕布上。当幕布下到最下位置时,通过限位开关一直发出信号,电机停止转动,但继电器保存信号,使下一次通电时,电机必须反转,因此采用互锁电路。
本实验台机电相结合,集科学性与趣味性于一体,寓教于乐,以学生熟悉的教学环境设计机械系统传动系统,情景式教学演示台,可以极大地提高学生的学习机械原理课程的兴趣,有利于进行课堂教学。
