 返回首页
返回首页 在线订单
在线订单 联系我们
联系我们

组态软件在PLC 实验系统中的应用
发布时间:2017-07-03 点击次数:次
可编程序逻辑控制器( PLC) 是上世纪60 年代发展起来的工业自动控制装置。多年来以其强大的功能广泛应用于各行业的现场控制中。但是,以PLC 单独构成的控制系统,有自身的局限性。主要表现在其监控系统没有良好的用户界面,无法很好地显示控制对象的实时状态,无法打印报表、存储大量数据等。
组态软件是数据采集与过程控制专用软件,是自动控制系统监控层的软件平台和开发环境。将组态软件应用于PLC 装置中,以弥补PLC 这一缺陷。
在电气类专业教学中,PLC 是必修课程,课程实践性较强,必须进行实验教学。然而,PLC 的控制对象一般价格昂贵、体积庞大、维护困难,投入建设可能性较小。本文以组态软件为工具,模拟PLC 的控制对象,开发了PLC 实训教学系统,应用于PLC 的教学和科研中,不仅降低了教学成本,也丰富了实验内容,有一定的应用价值。
1.系统结构
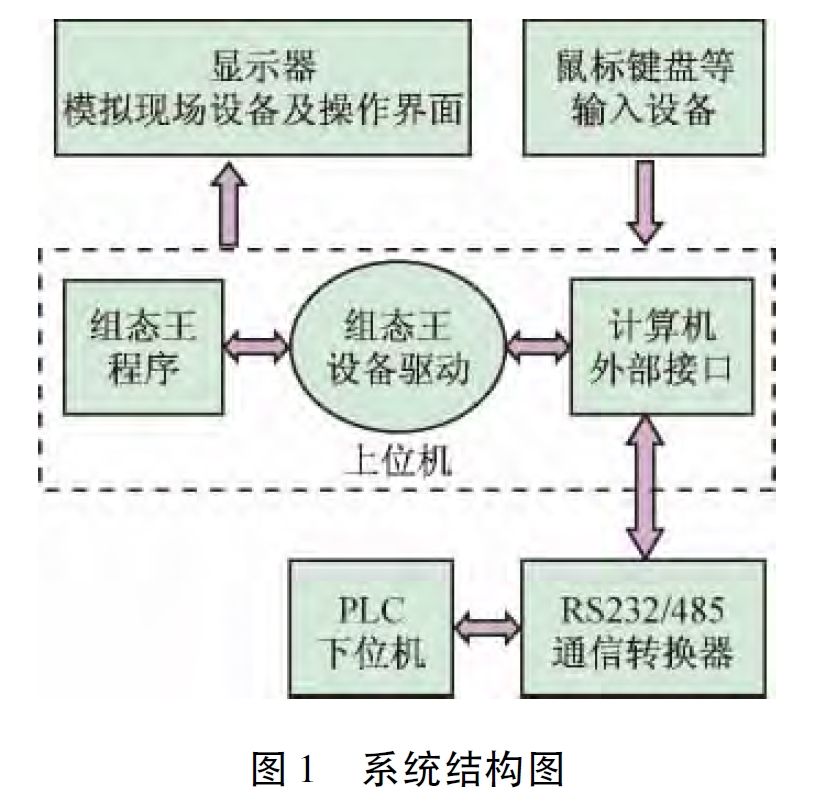
系统总体结构是由计算机以及运行软件构成也称监控管理层,即监控上位机; 由PLC 和其控制对象构成的现场控制层,PLC 控制对象由上位机组态软件模拟仿真。
1.1硬件配置
每套系统主要由一台计算机和一台西门子S7-200 型PLC 组成,计算机与PLC 通讯用RS232 /485 转换器连接,其硬件接线及总体结构如图1所示。
1.2 软件环境
1.2.1 组态软件
本系统选用的是组态王6.5软件,软件由画面开发系统、运行系统、工程管理器和工程浏览器组成。
软件具有以下功能和特点:
(1)人机界面友好,操作简单,易学易用;
(2)实时监控能力强,能够设计较复杂的动画工业控制现场图像,并准确显示现场生产过程的实时数据和信息或趋势曲线,可以进行时间或事件的驱动报表打印,能够记录所有监控设置的报警信息,具有脚本语言的二次开发功能;
(3)提供多种硬件设备的驱动程序( 包括PLC、工控板卡、变频器、智能仪表、智能模块等) 。
1.2.2 STEP7软件
STEP7是用于SIMATIC S7系列创建可编程逻辑控制程序的标准软件,可使用梯形图逻辑、功能块图和语句表进行编程操作。本系统应用的是STEP7-Micro /WIN32 版本。STEP7-Micro /WIN32 编程软件是基于Windows 的应用软件,功能强大,主要用于开发程序,也可用于适时监控用户程序的执行状态。加上汉化后的程序,可在全汉化的界面下进行操作。
2.4 梯形图运行分析
1.3 设计原则
为确保满足系统设计要求,保证实训设备运行安全可靠,采用以下设计思想:
(1)安全可靠。由于组态软件可靠性高,能够简化算法设计、缩短开发时间,通用性强,还能降低成本,因此将组态软件作为上位机的开发平台。
(2)采用集散控制思想。上位机和下位机通过串行编程电缆通讯,传输数据和控制信息。它们在控制系统中承担的工作不同,上位机主要承担监控工作,实时反映下位机所控制的工业现场设备的运行情况。即使系统出现故障,上位机停止工作,也不会影响现场设备。系统有效分散故障危险,确保现场设备的正常运转和系统的稳定可靠。
2.系统举例
以自动送料小车为例,介绍系统实现过程及功能。
2.1 自动送料小车系统控制要求系统初始时,小车位于A地,后限位开关被压下。当按下系统启动按钮,小车向前行驶,后限位开关弹起; 到达B地,前限位开关被压下; 位于B地正上方漏斗门打开,进行装料操作( 系统设置装料时间为10s) ; 装满小车后,漏斗门关闭; 此时,小车向后行驶,前限位开关弹起; 到达A 地,后限位开关被压下; 小车底门打开,进行卸料操作( 系统设置卸料时间为15s) ;卸料完成后,小车继续向前行驶,如此往复。当按下系统停止按钮,小车不能马上停止,必须完成当前周期所有的工作后,停止于系统初始时的状态。
2.2 I/O分配
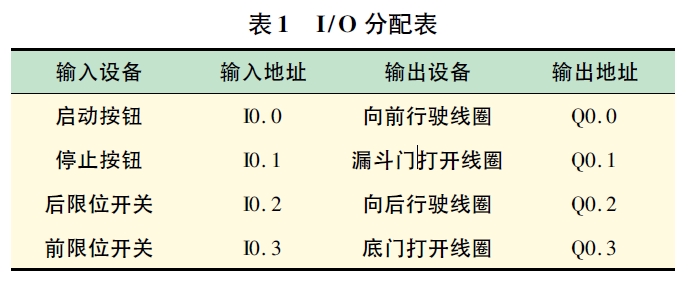
按照控制要求,对送料小车系统的输入/输出进行分配,如表1所示。
2.3 组态软件应用
应用组态软件实现对PLC控制的送料小车的仿真,主要完成了以下几个工作:
(1) 完成通讯。在组态王中定义设备,完成上位机与下位机的通讯;
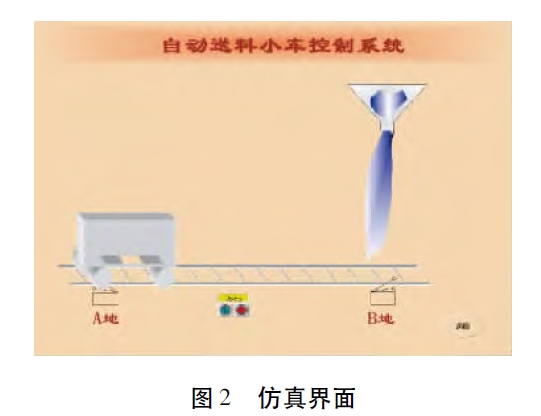
(2) 设计组态界面。如图2所示;
(3) 完成动画效果,编写脚本程序。此系统的动画效果主要有小车的水平运动效果、限位开关的压下弹起效果以及装卸料的动画效果。脚本程序主要实现了系统画面和变量初始复位、刷新变量、与PLC交换数据以及动画效果的实现。
该系统中控制对象运动过程比较简单,而且很有规律,采用顺序功能图的编程方法比较合适。
2.5 整体运行与综合测试
2.5.1 整体运行情况
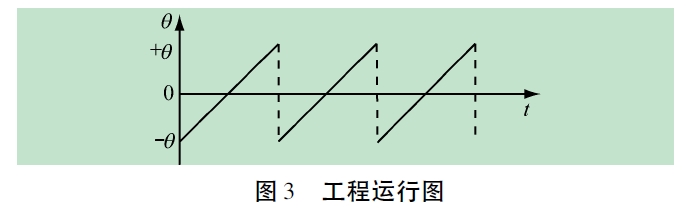
PLC下载运行程序后,在组态运行环境下,小车能够随着程序运行做出反映,动作准确无误。计算机显示了小车往返的动作过程,画面清晰,准确,实时性较好,工程运行图如图3所示。系统具体功能如下:
(1)输入/输出信号通讯通畅、无误。能够向PLC发出输入信号,系统启动、停止、AB地限位开关的开与关。
能够接受PLC的信号输出信号,并且完成程序指定的动作,小车前进、后退、漏斗门和小车底门开关。
(2) 控制对象状态显示逼真,能够直观反映PLC的程序运行结果。小车在程序运行时,能够按照控制要求和程序运行进度做出预期动作,比较形象逼真地模拟了PLC的控制对象。调试人员可以通过小车的状态了解程序运行情况和结果。
2.5.2 系统扩展功能及优缺点
(1)系统扩展功能。在不改变系统输入输出变量的情况下,修改控制要求编制程序,被控对象送料小车能够按照运行的PLC程序,执行动作,系统运行正常,效果同前。可见,系统运行方式只受用户的算法控制,而不受仿真控件的限制,达到了预期的设计效果。
(2)系统优缺点。系统用于教学具有如下几点优点: ① 仿真效果好; ② 开发周期短; ③ 投入教学和后期维护费用低; ④ 具有较高安全性。
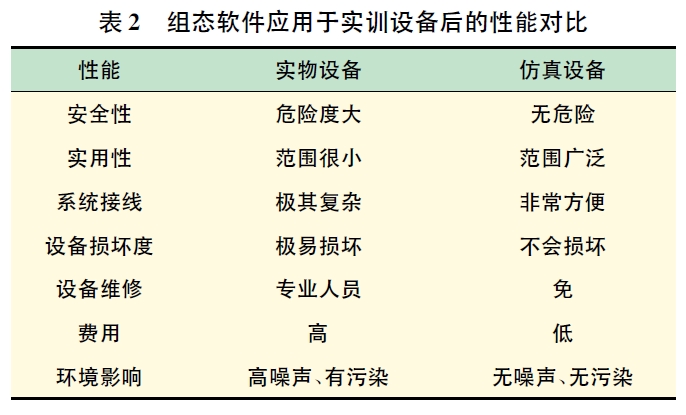
将系统应用于PLC 的教学和实训中,收到意想不到的效果,与之前的教学相比较,有如下几点改进,如
表2 所示。
除运料小车外,还开发了12个经典的控制系统的仿真系统,投入使用收到良好的效果。
